三菱電機は、人でしか組み立てが困難であった電機・電子製品の自動組み立てを実現する次世代ロボット生産システムのプロトタイプを開発、3日に同社先端技術総合研究所でデモンストレーションが行われた。このロボット生産システムを駆使することにより、生産ラインの最終組み立て工程を全て自動化することが可能となる。
同社は、エネルギー・産業技術総合開発機構(NEDO)の戦略的先端ロボット要素技術開発プロジェクトに参加し、「柔軟物も取り扱える生産用ロボットシステム」の研究開発を進めてきた。
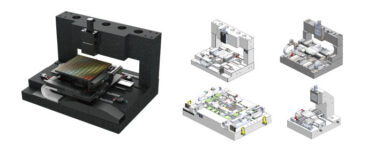
このほど、専用の小型3次元ビジョンセンサとその応用技術を開発し、これまで人でしかできなかった柔軟物の組み付けの自動化を実現した。同センサは容積が300ccと小型で、ロボットのハンドリングに採用できる。さらに、計測分解能は1ミリ精度で計測できるなど非常に高機能である。
また、センサ情報を駆使し作業ミスを自動で検知・復旧する自動復旧技術を開発、無人化を阻害していた停止作業の低減を図ることができる。さらに、オフラインプログラミング技術を開発し、自動化システム導入の障壁となるプログラミング・調整時間を短縮することができる。
従来、産業用ロボットは人が教える決まった動作しかできないことから、形が自在に変わる柔軟なケーブルの組み立てや配線工程、バラ積み部品の供給工程などが困難であった。
同社が開発したロボットシステム技術は、ロボットの目となる3次元センシング技術、手先の感覚となる組み立て制御技術、ロボットが自分で組み立ての失敗を見つけ修正する自動復旧技術、ロボットへ動作を教える時間を短縮するオフラインプログラミング技術などの要素技術、さらに、これらの技術を統合した組み立て実証システムを搭載した。
ロボットのプロトタイプは、産業用のFA制御機器を組み立てるもので、ビジョンセンサによりケーブルの認識と整列、力センサを利用した組み立て制御技術によるケーブルの挿入作業、さらに挿入の位置ずれエラーの自動修正と、基板や蓋のねじ締めエラーの検知を行う。特にビジョンセンサは、乱雑に積まれたケーブルの取り出しと整列を行い、力センサは繊細かつ、高速なコネクタ挿入を行うのが特徴である。
ものづくりの国内回帰が進む中、少子高齢化と労働力人口の減少が進み国際競争が激化している。一方で、大量生産から多品種・変量生産へ移行しており、生産性向上による競争力強化が要求されている。こうした状況下、自動化ラインの生産性・信頼性と、「人セル・人ライン」の簡便性を併せ持つ次世代生産用ロボットシステムの実現が望まれている。同社が今回開発したプロジェクトは、「人セル」と同等の「ロボットセル」を実現する技術開発プロジェクトで、人・ロボット作業双方の選択幅を拡大するものである。
同社は、電機・電子分野製品の組み立てに適用可能な柔軟物ハンドリング技術を開発したことで、今後この要素技術を応用し、ロボットのコンポーネント製品として、順次発売していく方針である。
 オートメーション新聞は、1976年の発行開始以来、45年超にわたって製造業界で働く人々を応援してきたものづくり業界専門メディアです。工場や製造現場、生産設備におけるFAや自動化、ロボットや制御技術・製品のトピックスを中心に、IoTやスマートファクトリー、製造業DX等に関する情報を発信しています。新聞とPDF電子版は月3回の発行、WEBとTwitterは随時更新しています。
オートメーション新聞は、1976年の発行開始以来、45年超にわたって製造業界で働く人々を応援してきたものづくり業界専門メディアです。工場や製造現場、生産設備におけるFAや自動化、ロボットや制御技術・製品のトピックスを中心に、IoTやスマートファクトリー、製造業DX等に関する情報を発信しています。新聞とPDF電子版は月3回の発行、WEBとTwitterは随時更新しています。