1
これから期待のPCベースコントローラ
PCベースコントローラ(以下、PCベース)は、汎用PCを利用したコントローラで、欧米では一般的である。また、FA(Factory
Automation)の中で多軸モーションや高度なサーボ応用の役割が重要となっているが、ネットワークサーボの発展とともに、PCベースをモーションコントローラとして応用する製品も欧米を中心に拡大してきた。
ただ、日本市場では、半導体製造装置でPCベースが目立つものの、FA業界全体では、汎用PLC(Programmable
Logic
Controller)や工作機/産業用ロボットなどのNC(Numerical
Control)と比べて信頼性の面で不安視されるなど、PCベースは敬遠されてきた。
しかし、PCベースはCPU能力の高さから強力なコントローラとなる可能性を持っている。また、Windowsの拡張性や便利さも強力なツールと言える。そのため、敬遠された理由の弱点を解決することでPCベースコントローラは日本市場においても発展すると考えられる。
ここでは、Windowsも同時に活用するPCベースモーションをテーマに、発展の背景・特徴・今後の期待に触れるとともに、テクノのPCベースモーションコントローラである「PCベースファインモーション(Fine
Motion)」について紹介する。
1-1
PCベースが日本のFA業界で敬遠された理由
PCベースがFA業界で敬遠されていたのは、概ね以下の理由からである。
(1)Windowsが不安定
Windowsに依存したシステムではハングアップなどによるシステムダウンの懸念があった。事実、Windowsの汎用アプリケーション利用中に原因不明なトラブルを経験したことはあろう。
(2)PCのハード的弱点
ハードディスク(HDD)やファンにはモータや機構部があり、消耗してトラブルになるリスクある。また、耐環境性(熱・振動など)の面でFA機器のような配慮がなかった。
1-2
PCベースに期待するポイント
PCベースには一般のFAコントローラに比べて圧倒的に勝る点がある。
◆CPUの処理能力が非常に高い。
◆PCやWindowsに関連した市販のソフトや技術が多く、連係のメリットが大きい。
◆汎用PCの基本構成は互換性があり、PCの選択が容易である。
つまり、1-1の懸案が解消されれば強力なコントローラとなり、大きなメリットが期待できる。
2
PCベースモーションが生まれた理由
2-1
PCベースモーションに期待する背景
近年、先端的な生産設備において、品質・タクト向上・設置面積の効率化などが求められる中で、生産技術の高度化に伴いPLCでは実現しにくい複雑な動作が必要とされている。例えば、位置・速度・力(トルク)の全ての面で緻密さが求められる複雑な動作である。また、動作の複雑さに伴い多軸化が進み、さらに多軸を同期・連係させる制御が重要になっている。
PCベースモーションとは、汎用PCのハードを利用しモーション機能を実現したコントローラであり、多軸や複雑な制御に対して、柔軟に対応できる自由度を持っている。
2-2
PCベースモーションを支える技術
(1)CPU処理能力
PCのCPU処理能力はFA製品のマイコンに比べて数十倍以上(テクノ経験値)である。
(2)Windows共存のRTOS(Real
Time
OS)
Windows使用中の原因不明トラブルは誰しもが経験していることと思われる。PCベースモーションを使用する上でWindowsによるトラブルをなくすことは最重要課題である。そこでPC上にRTOSを導入し、RTOS上で制御ソフトを安定動作させる手法が有効である。
PCベースでのRTOSは、Windowsとの相性が良いINtimeやRTXが一般的である。RTOSをWindowsと共存させることで下記のことが可能となる。
◆Windowsに依存しない制御:Windowsが止まってもRTOS上の制御は動作可能
◆定時性:例えば正確な0.1msec周期の制御を実現
つまり、RTOSによりWindowsの不安定さは十分に解決できる。
また、Windowsや関連のアプリケーションを活用できることはFA分野において魅力的である。
その他にも、RTOS上の省配線サーボ用のドライバソフトやソフトPLCが入手しやすくなっている点もポイントである。
(3)PC関連の進歩/IPCの発展
回転体や消耗品を使用しない信頼性の高いIPC(Industrial
PC)を購入できるようになった。
◆SSDによるHDDレス
◆省電力CPUによるファンレス
◆耐環境性(熱・振動など)・信頼性を考慮した設計や構造
上記によりPCのハード的弱点は十分に解決できる。
(4)省配線(ネットワーク)サーボの発展
近年、省配線サーボの発展がめざましい。サーボ自体の機能が向上しており、それを活用するには、ネットワークによる多軸制御が必須である。通信方式は、EtherCAT・MECHATROLINKなど複数あるが、コントローラと省配線サーボの接続性において以下のような特徴がある。
◆省配線:従来は各サーボアンプに対して、10~20本程度の配線が必要であったが、省配線サーボでは1本のケーブルでつなぐことができる。
◆データによる指令:データによる指令で、コントローラがより多くの情報を各サーボに伝えることができる。
◆詳細な情報伝達:大量のサーボ内情報をリアルタイムにやりとりできる。
(5)省配線I/Oの発展
省配線サーボのネットワークはI/O機器にも接続でき、マシンの入出力制御が行える。省配線対応のI/O機器は多くのメーカから市販されていて、購入も容易だ。
2-3
PCベースモーションのメリット
図1はPCベースモーションの一般的構成である。PCベースモーションのメリットを下記にまとめる。
(1)CPUの高い処理能力による多軸・多入出力制御
省配線によって数十軸のサーボや数百点のI/Oも簡単に配線できるようになったが、マイコンでは処理能力に限界があった。PCの高い処理能力であれば、そのような多軸/多入出力システムも高速に制御できる。たとえば、30軸/複数ステーションのマシンも1msec程度の制御周期で高度なモーション制御が可能である。
(2)省配線(ネットワーク)サーボによるメリット
省配線によって、多軸をより効率的に正確に制御できる。
◆多軸化が容易:サーボ間を1本のケーブルでつなぐため、多軸拡張が容易。
◆コストダウン:配線ケーブルの費用が激減。
◆信頼性アップ:配線ケーブルが少なくなるため配線のトラブル発生率が低くなる。
(制御盤のトラブルは配線やコネクタの不良による場合が多い)
◆高度な指令:ネットワーク/データ化により位置・速度・トルク(力)など様々な指令が可能。自由に切り替えもでき、高度なモーション制御が可能となった。
◆高精度な位置制御:データによる指令で、量子化単位を細かくできる。たとえば、制御単位1nmの時に1mの指令は10⁹となり、相当なデータ長が必要となる。
データでは瞬時にやりとりできるが、パルス列などの信号方式では、情報伝達が困難である。
◆高精度な速度制御:例えば、1nm制御単位で速度1m/秒は1Gppsとなる。1Gppsはパルス列指令では電気的に不可能であるが、データ指令では可能である。
◆アドバンスド制御:大量のサーボ内情報をリアルタイムに伝達できるためサーボの各種アドバンスド制御をコントローラから利用できる。
(3)省配線I/Oによるメリット
大量のI/Oやアナログ信号を同じネットワーク上で処理でき配線が簡略化できる。省配線I/Oモジュール
をセンサーやアクチュエータの近くにおいて、ケーブル1本でI/O情報のみをPCベースモーションに伝えることで各I/O配線を短くできる。そのため、配線トラブルも減少し、耐ノイズ性・メンテナンス・配線コストのメリットも大きい。
(4)PCハードの代替が容易
PCハードは特定のPCメーカに依存しないためハードの代替が簡単である。そのため、将来PCを交換する必要が生じた場合、他メーカを含めて選択が容易である。
(5)PC上の各種技術資産の活用
各種拡張ボード・ネットワーク関連・各種アプリ・画像処理・ソフトPLCなどPC関連のハード/ソフトが市販されているため、組み合わせや拡張が容易である。
(6)ライン管理などの拡張
LANによる複数のPCベースモーションの連係や管理、さらに工場全体の管理も容易である。
(7)PC部と制御盤の分離によるメリット
省配線の結果、PC部(制御・操作)と制御盤(サーボ・I/O機器)を分離配置できる。制御盤のサーボ・I/O機器は機体側の部品との接続が多く、機体近くに配置するのが配線コスト・耐ノイズ・信頼性・設置面積・保守性などで望ましい。PC部は比較的サイズも小さく、人の操作面でベストな位置に配置ができる。
(8)コントローラを集約することによるコストダウン
従来は、PC・PLC・画像処理・モーションの複数のコントローラを購入し、通信やI/Oで接続していた。PCベースモーションでは、それらをソフトで実現し、1台のPCでまかなえるためコントローラの購入コストを削減できる。
(9)各処理のリアルタイム連係とデータの一元管理
同じPC内のモーション・PLC・画像処理などはデータを共有化して、高速に連係できる。メモリ上で互いがつながっているので大量のデータも瞬時に渡せる。
3
テクノのPCベースFine
Motionの特徴とメリット
テクノでは2-1で述べた一般的な期待に加えて、先端的な生産設備においては以下の必要性を強く感じている。
◆機械・設備メーカの独自性の追求(常に世界TOP技術であること)
◆機械・設備メーカのノウハウの守秘(海外や他社に技術を盗まれない)
◆組立・加工・成形など異質な作業も同時並行で複合的に行える仕組み
これらを考慮しつつ、25年にわたるモーション制御の蓄積をINtime上に「PCベースFine
Motion」として集大成した。構成と特徴を図2に示す。
テクノのPCベースFine
Motionの特徴とメリットは、以下の通りである。
3-1
自動機制御としての完成度
Fineとは完成度の高さを意味している。Fine
Motionは精密加工・ロボット・巻き線・射出成形・電子カムマシンなど多様な自動機に対して、テクノが供給する形態のまま、すぐに運転できるモーションコントローラである。
(1)標準運転ソフトですぐに運転(図3)
Windowsのアプリソフトとして、運転操作のソフトを完備している。Fine
Motionの全ての機能を使えて、自動・手動のあらゆる運転が可能である。導入後そのまま日常運転ができる。
(2)G言語やテクノ言語で緻密な動作を記述(図4)
緻密な動作を簡単な命令列(文字形式)で運転プログラムとして記述して実行できる。1動作を1行で表現でき、動作と命令が1対1でわかりやすい。PLCラダーや特殊なモーション言語のような設計作業は不要で、動作をそのまま記述できる。また、運転プログラムを見て簡単に動作を理解できるので、担当者が変わっても簡単に引き継ぐことができる。
(3)豊富なモーション機能(図5)
加工機・ロボット・巻き線・成型・電子カムマシンなどに、すぐに使える機能の各々を完成形で準備してある。これらもG言語やテクノ言語で簡単に指令できる。
3-2
独自性の追求
Fine
Motionは、機械・設備メーカ(ユーザ)の独自ソフトと3種の方法で接続できる。
また、Fine
Motionの中にユーザロジックを組み込むこともできる。つまりユーザ自作ソフトによる独自性の追求を可能としている。
(1)Windows側へのソフトインターフェース公開(WIN-IF)
一般的なDLL(Dynamic
Link
Library)で公開しており、独自の画面・CAM・EXCELソフトなどから自由に運転できる。
(2)INtime上のソフトインターフェース公開(C-IF)
ユーザ自身で制御ソフト(C言語)を作成し、Fine
Motionとリアルタイムに連係できる。
(3)PLCとのソフトインターフェース公開(PLC-IF)
ソフトPLC「ProConOS」からモーション機能を全て利用することができる。自動/手動運転中のタスクに、PLCから直接の介入や指示もできる。モーション制御の内部情報のほとんどをPLCから監視することもできる。
(4)Fine
Motionのソースインターフェースを公開
ユーザの制御ロジックをFine
Motionに組み込むことができる。例えば、ロボットの機構変換や特殊な軌跡発生をユーザ自身で開発することも可能である。
3-3
効率的なカスタマイズ(専用対応)
モーション機能に密接に関わる特殊化については、機械・設備メーカ(ユーザ)の詳細要望をヒアリングして、テクノの開発スタッフがソフト改造を行う。長年の技術蓄積と経験の上で、効率よく対応できる。
3-4
EtherCATとMECHATROLINKの両方式に対応
EtherCATは、世界的に使用され、国内外のメーカから広く購入できる。MECHATROLINKは、サーボ主体のネットワークで、信頼性や耐ノイズ性に優れている。テクノでは、用途や要望に応じて、棲み分けになると考えている。Fine
Motionでは両方式を同様に使用でき、ユーザが選択できる点が大きなメリットである。
3-5
ノウハウの守秘
日本の生産技術が海外展開する中で、機械・設備メーカのノウハウを守秘する必要がある。
Fine
Motionでは複数の対策により、ノウハウを守っている。
◆ソース情報はPCに保存しない。実行形式のソフトのみで、仮に不正コピーされても元情報は、不正入手できない。
◆不正コピー防止として、BIOS/INtime/各ソフトの3重のプロテクトを実施している。詳細は、明確にはできないが、複数のソフト階層で不正コピーの防止対策をしている。
◆機械・設備メーカ(ユーザ)毎の守秘
テクノでは、ユーザ自身で独自ソフトを組み込むことを推奨している。そのことで全く独自のシステムとなり、簡単にまねはできない。専用化したシステムは、他への転用はあり得ず、完全に保護できる。
3-6
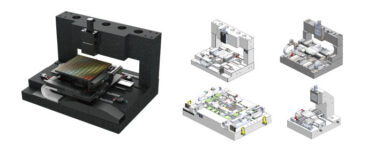
複合マシンを1台のPCで一括制御(図6)
PCベースFine
Motionは、処理能力の高さから、複数の緻密マシンを同時に制御できる。たとえば、8台のロボットやNC機を一括制御し、一方が自動運転中に、他方を手動・調整することも可能である。図6にそのイメージを示す。
生産の高度化・高密度化に応じて、複数の工程を1つの小ライン(複合マシン)で自動化する必要性が高まっている。今後の日本の生産技術の方向性の1つであり、PCベースFine
Motionがその基幹技術となるものと期待する。
4
今後のPCベースモーション
日本の生産構造は、大きく変化した。従来のように一定の品質で大量生産するような生産は、海外との競争では厳しい。常に、海外の生産技術に先行する独自性や差別化が必須である。そのような背景から、ますます高度なモーション制御の重要性が高まる。また、タイムリーな生産やライン変更にもスムーズに対応できる共通プラットフォームとしてのPCベースモーションの重要性はますます高まるものと予想する。
(筆者=株式会社テクノ
山中裕貴氏/野崎兼知氏)
 オートメーション新聞は、1976年の発行開始以来、45年超にわたって製造業界で働く人々を応援してきたものづくり業界専門メディアです。工場や製造現場、生産設備におけるFAや自動化、ロボットや制御技術・製品のトピックスを中心に、IoTやスマートファクトリー、製造業DX等に関する情報を発信しています。新聞とPDF電子版は月3回の発行、WEBとTwitterは随時更新しています。
オートメーション新聞は、1976年の発行開始以来、45年超にわたって製造業界で働く人々を応援してきたものづくり業界専門メディアです。工場や製造現場、生産設備におけるFAや自動化、ロボットや制御技術・製品のトピックスを中心に、IoTやスマートファクトリー、製造業DX等に関する情報を発信しています。新聞とPDF電子版は月3回の発行、WEBとTwitterは随時更新しています。