産業用ロボットにとって、対象物に触れて掴む「ハンド」は最も重要な部品。しかし、対象物によって重い/軽い、硬い/柔らかい、大きい/小さいなど特徴はさまざま。帝人エンジニアリング(大阪市中央区南本町1-6-7、TEL06-6268-2100、坪井理史社長)は、トヨタ自動車と共同で、形状や材質を問わず、どんな対象物にもなじんでしっかり固定できるハンド「てるぷよハンド」を開発。その詳細を、志村英治事業開発部長兼第二事業部門機器システム事業部FAシステム課長に聞いた。
産業用ロボットにとって、対象物に触れて掴む「ハンド」は最も重要な部品。しかし、対象物によって重い/軽い、硬い/柔らかい、大きい/小さいなど特徴はさまざま。帝人エンジニアリング(大阪市中央区南本町1-6-7、TEL06-6268-2100、坪井理史社長)は、トヨタ自動車と共同で、形状や材質を問わず、どんな対象物にもなじんでしっかり固定できるハンド「てるぷよハンド」を開発。その詳細を、志村英治事業開発部長兼第二事業部門機器システム事業部FAシステム課長に聞いた。
-てるぷよハンドの開発の経緯は。
志村部長 トヨタ自動車様から、ランダム生産に対応したハンドが欲しいという声がきっかけだった。これまでシリンダヘッドやエンジンブロックなどを運ぶ際、機種ごとにそれぞれの形状に合わせたハンドが必要だった。掴む対象物が変わるとハンドも交換しなければならず、そのための段取り替え時間がかかっていた。
-どんな構造になっているのか。
志村部長 粒状のセラミック材が詰まった内袋と、それに被せる外袋の「手のひら」、それを保持する「手の甲」、変位と荷重を制御するマニピュレータとなる「手首」で構成されている。 人の手のような機構では複雑で大きく重くなってしまうので、なるべく軽く、簡単な構造を追い求めた結果、生まれたのがこの構造だ。 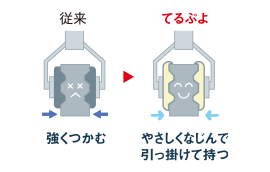
-具体的に、どのような原理なのか。
志村部長 例えば枕やビーズクッションのような小さな粒が入った袋は、荷重をかけると粒が動いて頭や体にフィットするように形を変える。その状態で袋内部の空気を抜いて真空状態にすると、粒同士が密着して、対象物になじんだ形で硬くなる。この原理を使えば、どんな形状も転写してフィットした形のハンドができ、しかも構造が単純で軽くできる。てるぷよハンドは対象物になじんで硬くなるまでのタクトタイム1秒以下を実現している。
しかし、袋は摩耗して穴が空く可能性がある。それを防ぐために内袋と外袋の二重構造とし、外袋には対象物や用途に合わせて素材を選べ、消耗品として簡単に交換できるようになっている。 例えば外袋の素材には、鉄の8倍の引っ張り強度を持つアラミド繊維「テクノーラ」、柔らかく優しい人工皮革「コードレ」など帝人グループの素材を活用したものを用意している。これ以外にも、素材メーカーの強みを生かし、さまざまな特徴の外袋を提供できる可能性がある。 
-今後について。
志村部長 共同開発のトヨタ自動車様をはじめ、軽重さまざまなところで使っていただいている。一番重いもので数百キログラム超のエンジンブロック、軽いものでは電子部品など。壊れやすく、傷つきやすいものでは、電球の薄いガラスやめっき加工された部品のハンドリングなど。 ロボット用ハンドは標準化が進んでおらず、一品一様が多い。てるぷよハンドは、形状に合わせて変化するので、ひとつでさまざまなワークに対応できる。位置決めもアバウトでよく、ティーチングも簡単だ。てるぷよハンドでロボットハンドの課題を解決していきたい。
帝人エンジニアリング
http://www.teijin-eng.co.jp/telpyohand/
 オートメーション新聞は、1976年の発行開始以来、45年超にわたって製造業界で働く人々を応援してきたものづくり業界専門メディアです。工場や製造現場、生産設備におけるFAや自動化、ロボットや制御技術・製品のトピックスを中心に、IoTやスマートファクトリー、製造業DX等に関する情報を発信しています。新聞とPDF電子版は月3回の発行、WEBとTwitterは随時更新しています。
オートメーション新聞は、1976年の発行開始以来、45年超にわたって製造業界で働く人々を応援してきたものづくり業界専門メディアです。工場や製造現場、生産設備におけるFAや自動化、ロボットや制御技術・製品のトピックスを中心に、IoTやスマートファクトリー、製造業DX等に関する情報を発信しています。新聞とPDF電子版は月3回の発行、WEBとTwitterは随時更新しています。