日立製作所は、物流倉庫で目的の商品が保管されている棚まで移動して商品を取り出し、箱詰めまで行える自律型の双腕ロボットの制御技術を開発した。走行台車と昇降台、2本のアームを連携し、商品の素早い取り出し動作で、人と同じような集品作業を実現。多品種少量商品の倉庫での作業の効率化を可能にする。
開発の背景として、通販市場の拡大や顧客ニーズの多様化で多品種少量の商品を扱う倉庫が増加。その内部では、広大な保管エリアから注文に応じて棚に並んだ商品を取り出す集品作業が行われ、その作業はさまざまな形状や重さの商品に対応するために人手で行われるケースが多かった。仕分けソーターやAGV(無人搬送車)などを導入しているところもあるが、それも一部で限定的。またアーム型ロボットを搭載した移動ロボットも研究されているが制御が難しく、人手に代わるまでにはいたっていない。
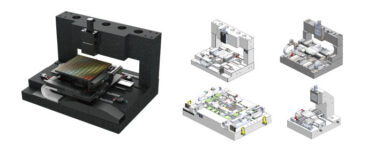
それに対し同社は日立物流と協力し、走行台車の上に昇降台を載せ、2本のアーム型ロボットとグリッパ(ハンド)を搭載した自律移動型双腕ロボットを製造。少ない通信量で各機構を効率的に連携させる制御技術も併せて開発した。
ロボットは、走行台車と昇降台、アームの連携制御を実現。商品の取り出し動作をはじめる際、走行台車は保管棚に到着する1メートルほど手前でアームにカメラで商品を認識するように通知。アームは商品のおおよその位置を認識し、走行台車の停止予定位置でグリッパが商品の直前に来るようアーム自らが動き、昇降台に高さ調整を指示。停止後、走行台車は停止予定位置とのズレをアームに通知し、アームはその情報をもとにグリッパの位置を補正し、そのままの流れで商品を取り出すことができる。
またロボットは商品に応じて2本のアームの連携も可能。動作継続の許容範囲を事前に登録しておくことでアーム同士が連携でき、片方のアームで商品を支えながらもう片方で商品を取り出すなどの動作を一回の通信で実行できる。
これらの制御技術によって、従来の各機構が連携していないロボットで7秒かかっていた作業が、3秒に短縮。また1本のアームでは取り出せない奥行き30センチメートル・1キログラムの箱も2本連携して取り出しが可能。さらに箱のなかのペットボトルを引き出して取り出したり、片手で持っている箱に商品を詰めるなど、人と同じような作業も実行できることを確認した。
 オートメーション新聞は、1976年の発行開始以来、45年超にわたって製造業界で働く人々を応援してきたものづくり業界専門メディアです。工場や製造現場、生産設備におけるFAや自動化、ロボットや制御技術・製品のトピックスを中心に、IoTやスマートファクトリー、製造業DX等に関する情報を発信しています。新聞とPDF電子版は月3回の発行、WEBとTwitterは随時更新しています。
オートメーション新聞は、1976年の発行開始以来、45年超にわたって製造業界で働く人々を応援してきたものづくり業界専門メディアです。工場や製造現場、生産設備におけるFAや自動化、ロボットや制御技術・製品のトピックスを中心に、IoTやスマートファクトリー、製造業DX等に関する情報を発信しています。新聞とPDF電子版は月3回の発行、WEBとTwitterは随時更新しています。