清水建設は、ロボットと作業員がコラボしながら建物を組み立てていく次世代型生産システム「シミズ スマート サイト」を構築した。2018年から関西の高層ビルの建築工事を同システムで行うことが決まっており、ロボットを利用した工程で70%以上の省人化ができると見込んでいる。
同システムは、自律型ロボットと建機、それらを制御する管理システムで構成。各ロボットはAIやIoTを駆使して、作業指示に基づいて、自分のいる位置と施工対象物を認識しながら現場内を移動して作業を行う。その稼働状況や結果はリアルタイムで記録・蓄積されてタブレット画面上でいつでも確認できるというもの。
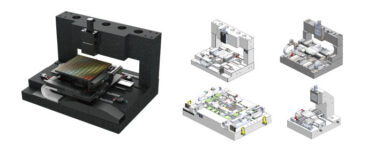
具体的な作業の流れは、基礎工事が終了後、全天候型の軽量屋根で建物をすっぽり覆って作業環境を作る。水平スライドクレーン「Exter」を中心に据え、鉄骨の柱や梁を所定の位置に吊り込む。次いで自走式の柱溶接ロボット「Robo-Welder」が、柱を溶接しながら躯体工事を進める。下層階から、天井や床材を2本の腕で施工する多能工ロボット「Robo-Buddy」が天井と床を仕上げていく。資材の搬入と各作業現場への配送は、搬送ロボット「Robo-Carrier」等で必要な場所に届けられる。
30階建て、3000平方メートルクラスのビルに適用した場合の効果は、揚重・搬送作業で75%。2500人、天井・床施工で75%・2100人、柱溶接作業で70%・1150人の合計6000人の省人化ができると試算している。また各建機とロボットは2・3現場を転用することで減価償却できるという。
各構成要素の概要
水平スライドクレーン「Exter」は、ブームを水平方向に伸縮できるのが最大の特徴。全天候カバーとの組み合わせは解体工事にも適用可能。製造委託先はIHI運搬機械で6月末に2機が完成している。
柱溶接ロボット「Robo-Welder」は、大阪大学大学院工学研究科の浅井知教授との共同開発。専用の走行台車上にセットされたロボットを所定の位置まで誘導すれば、作業員の介在なく完全自動溶接を行うことができる。ロボットはレーザー形状計測により溶接部位の溝の形状(開先形状)を認識。6軸で自由自在に動くロボットアーム先のトーチによりその溝を溶接材料で的確に埋めていく条件をリアルタイムに決定。ロボット2台が対になって溶接作業を行う。溶接済みの部位の品質を同じくリアルタイムに非接触で検査できるシステムも導入予定。製造委託先は愛知産業で、すでに3現場への適用が決まっている。
自走機能と2本の腕を持つ多能工ロボット「Robo-Buddy」は、レーザーセンサとBIM(ビルディングインフォメーションモデリング)情報を照合して自分の所在位置を認識し、指示された作業場所まで自動で移動。20センチメートルの段差なら乗り越えられる。2本のロボットアームは6軸で自由に動き、30キログラムの資材を把持でき、自動走行台車の昇降式台座上で稼働する。画像センサとレーザーセンサで施工部位を認識し、天井吊ボルトのインサートへの挿入、下地材の組み立て、天井ボードの取り付け、ビス留め、OAフロアの台座・パネルの設置などを行う。ハンド(エンドエフェクタ)を取り換えることで多能な機能を発揮することができる。製造委託先は東洋鐵工所で、アットロボティクスが開発協力している。
資材の運搬と配送は、搬送ロボット「Robo-Carrier」など4種類のロボットで構成された自動搬送システム。統合管理システムの指示を受けて稼働する。
パレット積みの資材が運び込まれると、地上階に配備されたRobo-Carrierが、インテリジェントなエレベータ「Autonomous-ELV」に積み込む。エレベータが目標階に到達すると、別のRobo-Carrierが資材積み出し、仮置き場まで搬送。仮置き場に積まれた資材は、ロボットフォークリフト「Robo-Fork」で、台車「Robo-Assist」に積み替えられ、Robo-Buddyのもとに運ばれていく。Robo-Carrierは、レーザーセンサとBIM情報の照合により自分の所在位置を認識し、指示された作業場所まで資材を自動搬送する。障害物があると搬送ルートを自動的に再検索・修正できる。11月から都内の現場で稼働する予定。
 オートメーション新聞は、1976年の発行開始以来、45年超にわたって製造業界で働く人々を応援してきたものづくり業界専門メディアです。工場や製造現場、生産設備におけるFAや自動化、ロボットや制御技術・製品のトピックスを中心に、IoTやスマートファクトリー、製造業DX等に関する情報を発信しています。新聞とPDF電子版は月3回の発行、WEBとTwitterは随時更新しています。
オートメーション新聞は、1976年の発行開始以来、45年超にわたって製造業界で働く人々を応援してきたものづくり業界専門メディアです。工場や製造現場、生産設備におけるFAや自動化、ロボットや制御技術・製品のトピックスを中心に、IoTやスマートファクトリー、製造業DX等に関する情報を発信しています。新聞とPDF電子版は月3回の発行、WEBとTwitterは随時更新しています。