妙徳は、昭和26年創業の真空発生器「CONVUM(コンバム)」および吸着パッドの専門メーカー。吸着パッドは、ロボットなどを使用した真空吸着搬送シーンで使用され、直接最終製品に触れる重要な部品である。同社製品ラインアップには、大きさや材質の違いで、5000種類を超える吸着パッドがある。半導体製造装置から自動車部品、食品機械、包装機までありとあらゆる自動化生産設備において使用されている真空機器だが、この度、吸着パッドの部品単体ではなく、ロボットでの使用を想定し、ハンド部分との一体化を提案する「コンバム・ロボットハンド・キット」の販売を開始する。
ロボットハンド提案への背景
同社では、近年のロボット需要の拡大に伴い、真空機器選定に関する問い合わせや依頼が増大している。また、吸着パッドをロボットへ取り付けるための相談や、設計の依頼が日々増加している。理由は、吸着対象ワークが変わるたびに変更しなくてはいけない『ワンオフ(one off)』のハンド設計の工数に時間が取られるからである。通常は吸着対象ワークの変更に伴い、使用する吸着パッドの大きさや形状も変更されるが、このとき、ハンド側の取り付け寸法の変更等、ハンド設計に多くの工数が発生している。そこで同社では、吸着対象ワークごとに行わなければならなかったハンド設計の煩わしさを「ロボットハンドを標準化=キット化」することで削減し、ロボットを使用するお客さまおよびシステムインテグレーター(SI)様の工数を大幅に減らすことを目的に、「コンバム・ロボットハンド・キット」の提案を開始することとした。
コンセプト
可搬重量1~7㎏fの多関節ロボット/パラレルリンクロボットをターゲットとして、ハンドの汎用性、拡張性、ロボットでの稼働を見据えた剛性を満たした製品としている。
①選びやすさ
・ワークサイズからハンド選定が可能
・同社標準の吸着パッドの取り付けに対応
・「ロボットフランジ」+「フレーム」+「パッド金具」+「吸着パッド」が一度にそろう
②取り扱いやすさ
・金属製フレーム製で追加工が可能
・長穴を採用し吸着パッド取り付け位置の微調整が容易
・供給エアの分岐アダプ有無を選定できる
③剛性
・可搬重量を満足できる剛性を確保
・位置決め精度の向上
④短納期対応
・カタログ掲載品は在庫品とし短納期を実現
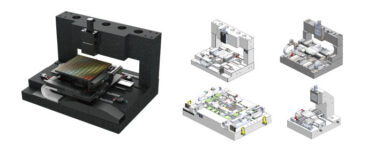
バリエーション豊富なキット設定
ロボットとハンドを接続するフランジは、主要ロボットメーカーの取り付け部に対応。ハンド部分の形状は、一般的な吸着搬送に適応できる3種類を標準化している。
1.KDPシリーズ…ロボットへのダイレクト取り付けタイプ。パラレルリンクロボット、スカラロボット、小型ロボット向け。吸着パッド位置は固定式で、吸着パッドが1~3個まで選べる組み合わせとなっている。ピッチの選択が可能。
2.FHシリーズ…H型のロボットハンド。小、中型ロボット向け。バータイプのフレームを任意に組み合わせることができる。フレーム内で吸着パッド位置が調整可能。フランジをセンターに配置し、パーツの追加によりH型からの拡張が可能となっている。
3.FXシリーズ…X型のロボットハンド。中型ロボット向け。フレーム内で吸着パッド位置が調整可能。より剛性に優れるシリーズ。フランジをセンターに配置し、そこからの拡張が可能となっている。ツールチェンジャーにも対応する。
全てのタイプのハンドに、同社標準の吸着パッドを取り付けることができ、吸着対象ワークのバリエーションは広がる。ロボットハンドキットの基本セットでの購入から、拡張部品のみの購入まで可能としており、ユーザの利便度は高い。
次世代ロボットハンドへ対応
同社は、吸着パッド単体のほかに、既に、ロボット用多機能吸着ハンド『SGHシリーズ』を販売開始している。これは、二重構造の吸着パッドとなっており、内側の吸着パッドでワークを吸い込み、外周の独立気泡体で作られたスポンジパッドでシールをして真空でつかむ。さまざまな形状のワークに対応でき、今まで吸着搬送が困難であったワークに対して非常に有効なロボットハンドとなっている。
ロボット需要が高まる中、ワークをハンドリングするロボットハンドの重要度は高く、真空機器の専門メーカーが提案するロボットハンド『コンバム・ロボットハンド・キット』の活躍の場は、大きな可能性を秘めている。
 オートメーション新聞は、1976年の発行開始以来、45年超にわたって製造業界で働く人々を応援してきたものづくり業界専門メディアです。工場や製造現場、生産設備におけるFAや自動化、ロボットや制御技術・製品のトピックスを中心に、IoTやスマートファクトリー、製造業DX等に関する情報を発信しています。新聞とPDF電子版は月3回の発行、WEBとTwitterは随時更新しています。
オートメーション新聞は、1976年の発行開始以来、45年超にわたって製造業界で働く人々を応援してきたものづくり業界専門メディアです。工場や製造現場、生産設備におけるFAや自動化、ロボットや制御技術・製品のトピックスを中心に、IoTやスマートファクトリー、製造業DX等に関する情報を発信しています。新聞とPDF電子版は月3回の発行、WEBとTwitterは随時更新しています。