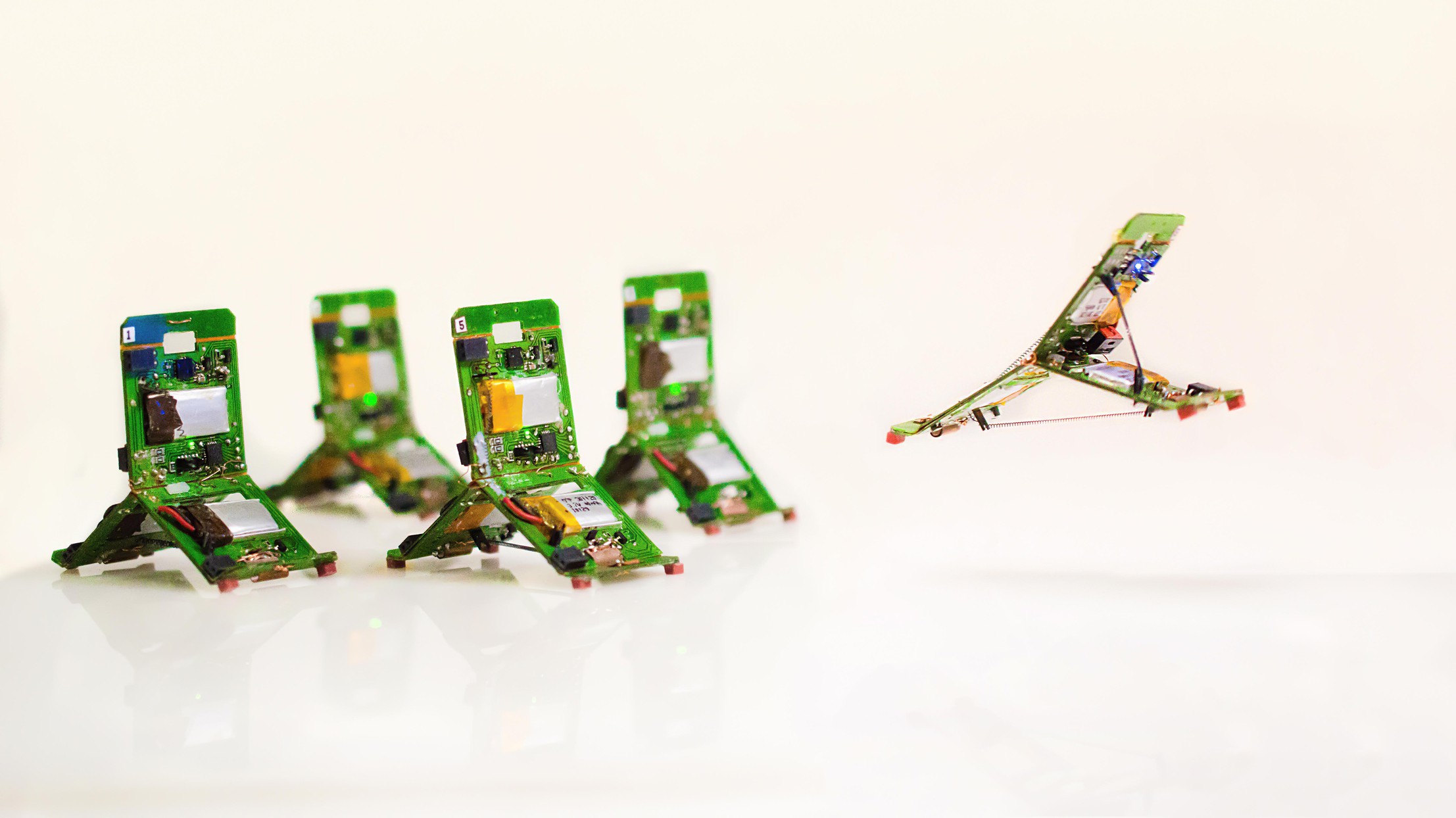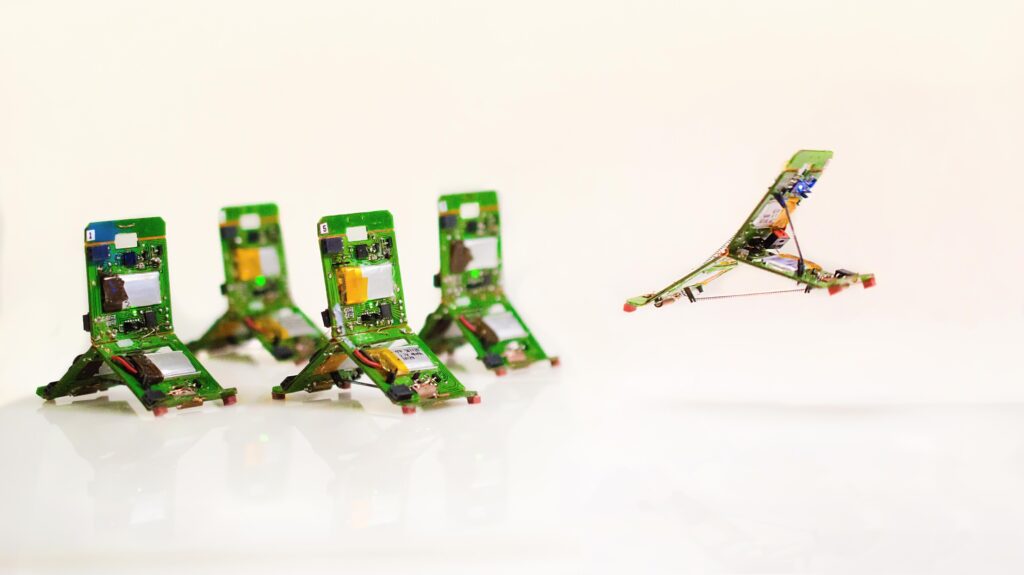
スイス連邦工科大学ローザンヌ校(EPFL)の研究チームは、アリにインスパイアされた重さわずか10gの小さなロボット「Tribots」を開発した。このロボットアリ、相互に通信し、役割を割り当て、複雑なタスクを集団で実行することができる。
Tribotsは、3本足でT字型の折り紙のようなシンプル設計のロボット。薄いマルチ素材シートのスタックを折り畳むことにより、数分で組み立てることができ、大量生産に適している。
検出や通信を目的とした赤外線および近接センサーを搭載しており、アプリケーションに応じてセンサーを追加することも可能。
Tribotsの動きはアリの動きをモデルにしており、形状記憶合金のアクチュエータを組み合わせ、凹凸のある上を歩く、平らな表面を這うほか、垂直ジャンプや水平ジャンプ、障害物を避けるための宙返りなどを行うことができる。
また、各ロボットはアリの集団行動のように特定の役割を割り振ることも可能。「explorer」「leader」「worker」に分かれ、explorerが障害物を検出してグループのメンバーに通知、次にleaderが指示を出し、workerが障害物を動かすなど、役割に応じて実行することができる。さらに、状況に応じて即座に役割を変更することも可能。「これは本物のアリができることを超えている」と研究チームは述べている。
出典:EPFL「Robot-ants that can jump, communicate and work together」
 オートメーション新聞は、1976年の発行開始以来、45年超にわたって製造業界で働く人々を応援してきたものづくり業界専門メディアです。工場や製造現場、生産設備におけるFAや自動化、ロボットや制御技術・製品のトピックスを中心に、IoTやスマートファクトリー、製造業DX等に関する情報を発信しています。新聞とPDF電子版は月3回の発行、WEBとTwitterは随時更新しています。
オートメーション新聞は、1976年の発行開始以来、45年超にわたって製造業界で働く人々を応援してきたものづくり業界専門メディアです。工場や製造現場、生産設備におけるFAや自動化、ロボットや制御技術・製品のトピックスを中心に、IoTやスマートファクトリー、製造業DX等に関する情報を発信しています。新聞とPDF電子版は月3回の発行、WEBとTwitterは随時更新しています。