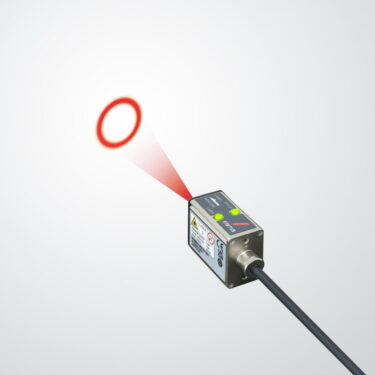
SICK(ジック)の「PLOC2D」は、2次元のロボット搭載用ハンドカメラのアプリケーションに特化したビジョンセンサ。ワークの2次元形状計測を行い、予め指定したワークの特異点にロボットのTCPを誘導する。取り付けはロボットやワークに干渉しない場所であれば、専用アライメントシートを用いてどこでも簡単にできる。
また、撮影はワーク平面と平行を担保する必要がなく、カメラを傾けて自由な位置で撮影が可能。しかも、ハンドカメラの特徴である色々な位置での撮影を想定して、複数の作業平面を登録し、切り替えて使えるようになっている。このため、ロボットを動かす、テーブルを動かすなど、ロボットピッキングの可能性を広げる。
さらに、独自開発したC-MOSイメージングセンサーと画像解析アルゴリズムで高い位置精度を担保し、プラスマイナス0・3㎜以下高い認識繰り返し精度を実現しており、他社のカメラでは認識が難しい小さいパーツや電子部品の認識も容易に行うことが可能。
そのほか、複数のワークを方向付け、順番付けをしてピッキング指示を行うソート機能も搭載している。
 オートメーション新聞は、1976年の発行開始以来、45年超にわたって製造業界で働く人々を応援してきたものづくり業界専門メディアです。工場や製造現場、生産設備におけるFAや自動化、ロボットや制御技術・製品のトピックスを中心に、IoTやスマートファクトリー、製造業DX等に関する情報を発信しています。新聞とPDF電子版は月3回の発行、WEBとTwitterは随時更新しています。
オートメーション新聞は、1976年の発行開始以来、45年超にわたって製造業界で働く人々を応援してきたものづくり業界専門メディアです。工場や製造現場、生産設備におけるFAや自動化、ロボットや制御技術・製品のトピックスを中心に、IoTやスマートファクトリー、製造業DX等に関する情報を発信しています。新聞とPDF電子版は月3回の発行、WEBとTwitterは随時更新しています。