増加するポジショナー/走行軸の相談
当社は多くの企業のロボット化の相談にのっている。6軸の多関節ロボットの導入を検討している顧客から「ポジショナーも導入した方が便利か?」「商社やSIer(システムインテグレータ)から走行軸を紹介されたが導入してよいか?」という相談が増加している。しかし、「便利そう」「紹介された」という理由だけで導入すると、後で「別の方法にした方が効率が良かった」という後悔を招く可能性が高いので、そのことを記載したい。
ポジショナー でリスクを軽減?
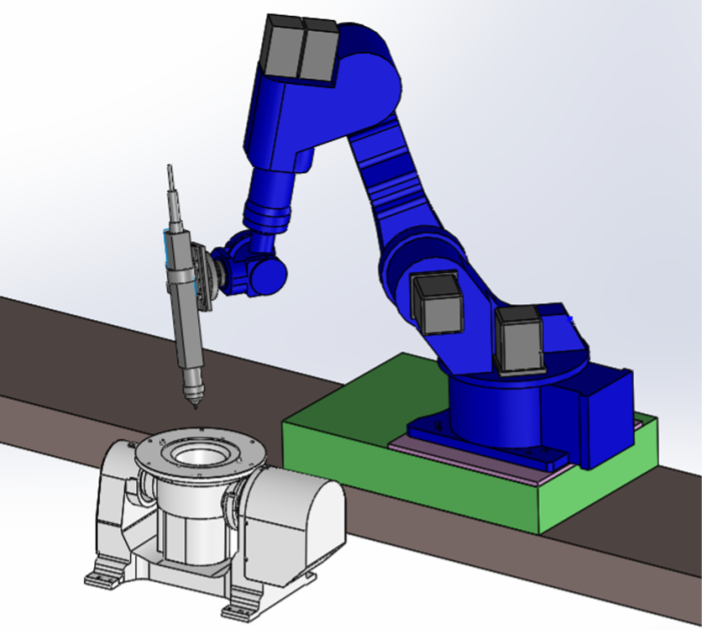
ポジショナーは「1軸型」「2軸型」が一般的で、筆者は多くの工場で「2軸型」を見かける。多くの企業が「2軸型」を用いる理由は、リミットオーバー/特異点/干渉というロボットのリスクをかなり軽減できるからである。特に切断/バリ取り/溶接などの用途で、1つの製品を一筆書きしたい場合は、重宝される。
更に、ツールの進行方向に常にツールの向きが向いていなければならない(超音波カッターで切断したい場合、など)はポジショナーが必須に感じるだろう。ただし、この場合はロボットの先端に1軸を追加するという (筆者は「ツール軸」と呼んでいる)もので解決できる可能性がある。しかし、このツール軸はロボットメーカーが既製品を販売しているわけではないので、コストの注意が必要である。コストの件に関しては、後述する。
ポジショナーの弱点/注意点
次にポジショナーの弱点であるが、ダントツで良く耳にするのが「ティーチングが非常に難しい、特に同期(ロボットと連動)させたい場合はなおさら」で、筆者も同感である。ティーチングソフトで簡略化をしようとしてもズレが生じる。なぜなら、ロボットとポジショナーは別々の機械であり、「ツールの先端の位置や姿勢」と「ワーク位置」をお互いに完璧に把握できないのだ。よって、当社以外のソフトで簡略化に挑んでも、現場でティーチングを1からやり直しになるだろう。
次に注意点だが、先ほど「リミットオーバーを軽減」と記載したが、そのためにはポジショナーとロボットの位置関係が非常に重要である。いくつかの工場で、ポジショナーの位置が適切でなかったため、ティーチングの際にすぐにリミットオーバーになってしまい、ロボットで加工したいワークの内1割しか加工が出来なかったという事例を目にしたことがある。この問題を起こさないためには、ポジショナーの種類やロボットからの位置を確定させる前に、ティーチングソフトを用いて「3次元的に検証」することが必須となる。ところが、この重要な検証を日本のSIerはやってくれない。よってソフトでの検証は、顧客が自らやる必要があり、その時にサンプルのワークではなく実際に加工するワークを用いて行うことも重要である。
これらの事前の検証を怠ると後で大変な問題(上述のリミットオーバーだけでなく、加工製品の出来栄えを悪くする)を生ずるので、導入(発注)前に必ず行ってほしい。
走行軸の強み/弱み
次に走行軸だが、ロボット自体が走行軸にのってに動くので、加工の場合、長いワークを一筆書きで切断/バリ取り/溶接など行うことができる。
しかし、産業用ロボットは小型以外は見た目以上に重たいため、素早く動かすことができないので、効率が良くない。
筆者は日本中の工場で多くの走行軸の設備を見てきたが、「走行軸でロボットを動かすよりも、複数のロボットで作業した方が圧倒的に効率が良い」という設備を良く目にする。そのことを設備の担当者にたずねると「商社やSIerから勧められたので、こうなってしまった」という回答が返ってくる。このパターンは、北海道から九州まで同じでうんざりする。
走行軸を勧める商社やSIerに従うと無駄なコスト!?
ではなぜ、商社やSIerは複数のロボットではなく、走行軸を顧客に勧めるのであろうか?これを述べると筆者の敵がますます増えるが、結論から述べると、利益率が非常に高いからである。ロボットやポジショナーだけの販売では、ロボットメーカーが指定するマージンしか利益がない。しかし、走行軸(や前述のツール軸)は価格を自由に決めることができる。顧客がロボットの素人であれば、「走行軸は見た目が立派で、高額な加工機に似ている」と思うらしい。そこが落とし穴で、高額な請求に納得してしまうというカラクリだ。これで効率が良ければまだよいが、複数のロボットを使うより効率が悪いことが判明すれば、泣きっ面にハチだ。
走行軸の価格は、サーボモータからロボットを1から製造した筆者からすると、設計と製作そして現地工事費やマージン込みでも概算で500万円くらいのモノが、実際は1000万円以上が多い。親しみやすい例を挙げると、150万円の軽自動車を3~400万円で買う感覚だ。
ちなみに、各ロボットメーカーが走行軸を販売しないのは、製品化してもポジショナーのように標準化出来ない(走行ストローク、構成等の変更が多い)上に台数が出ないことで、メリットが少ない(個別に製作するものとコストが変わらない)ことが主な理由である。しかし、その理由を言い訳にして、走行軸を高額にして良いわけではない。
さて、もちろん走行軸にした方が効率が良い場合もあるが、素人ではなかなか正しい判断ができないだろう。当社で良ければ遠慮なく相談してほしい。
◆山下夏樹(やましたなつき)

富士ロボット株式会社(http://www.fuji-robot.com/)代表取締役。
福井県のロボット導入促進や生産効率化を図る「ふくいロボットテクニカルセンター」顧問。1973年生まれ。サーボモータ6つを使って1からロボットを作成した経歴を持つ。多くの企業にて、自社のソフトで産業用ロボットのティーチング工数を1/10にするなどの生産効率UPや、コンサルタントでも現場の問題を解決してきた実績を持つ、産業用ロボットの導入のプロ。コンサルタントは「無償相談から」の窓口を設けている。
 オートメーション新聞は、1976年の発行開始以来、45年超にわたって製造業界で働く人々を応援してきたものづくり業界専門メディアです。工場や製造現場、生産設備におけるFAや自動化、ロボットや制御技術・製品のトピックスを中心に、IoTやスマートファクトリー、製造業DX等に関する情報を発信しています。新聞とPDF電子版は月3回の発行、WEBとTwitterは随時更新しています。
オートメーション新聞は、1976年の発行開始以来、45年超にわたって製造業界で働く人々を応援してきたものづくり業界専門メディアです。工場や製造現場、生産設備におけるFAや自動化、ロボットや制御技術・製品のトピックスを中心に、IoTやスマートファクトリー、製造業DX等に関する情報を発信しています。新聞とPDF電子版は月3回の発行、WEBとTwitterは随時更新しています。